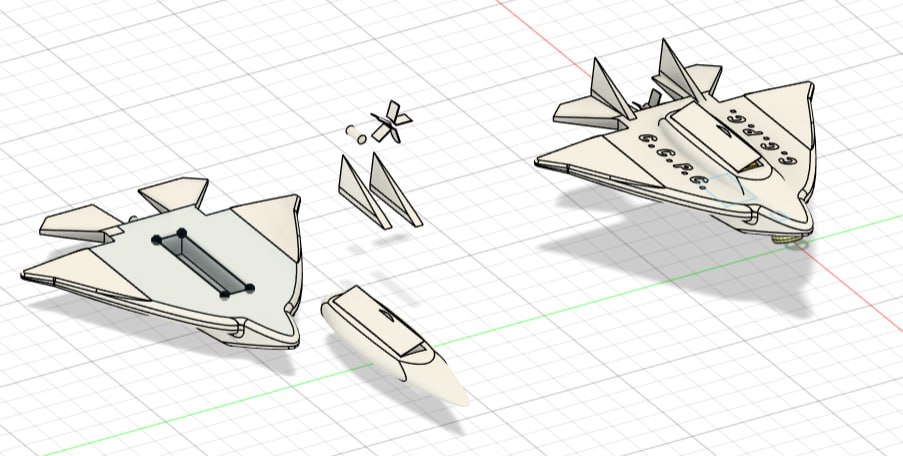
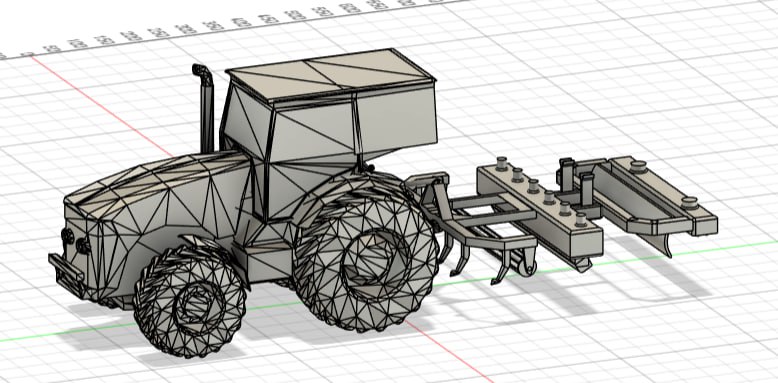
🚁 3D Модель дрона-скаута

Натисніть на картку, щоб переглянути детальну інформацію

| Параметр | Значення |
|---|---|
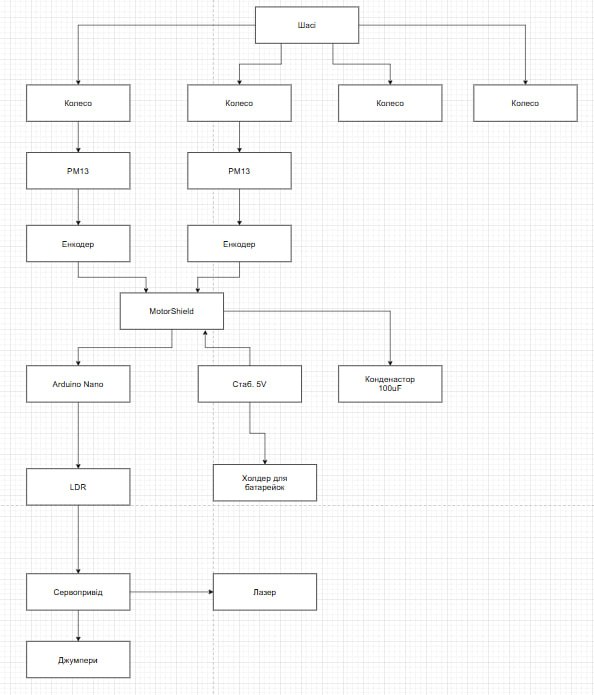
| Контролер | Arduino Mega 2560 + GPS Shield |
| Тип двигуна | Паливні комірки на водні (базові) |
| Потужність | 80 кВт (108 к.с.) |
| Запас ходу | 5-6 годин роботи |
| Швидкість | До 15 км/год |
| Точність позиціонування | ±5 метрів (стандартний GPS) |
| Сенсори | Ультразвукові HC-SR04 (4 шт), GPS NEO-6M |
| Навігація | Попередньо завантажені waypoints |
| Зв'язок | Bluetooth/RF модуль для моніторингу |
| Живлення електроніки | 12V акумулятор (10Ah) |
| Вартість компонентів | ~$8,000 (без трактора-бази) |
Дія: Оператор визначає межі поля через мобільний додаток
Мета роботи : Система отримує GPS-координати робочої зони
Дія: Дрон автоматично сканує поле, робить знімки
Результат: 3D-карта поля з рельєфом, перешкодами, якістю ґрунту
Дія: AI аналізує дані, розраховує оптимальний маршрут
Результат: Готова карта з маршрутами для трактора
Дія: Трактор самостійно обробляє поле за маршрутом
Опція: Дрон може моніторити процес в реальному часі
Результат: Якісна обробка з точністю ±2 см
Дія: При низькому рівні палива трактор їде до станції
Результат: Швидка заправка водню, продовження роботи
Дія: Система генерує звіт про виконану роботу
Результат: Карта покриття, витрати палива, час роботи, якість
Традиційний метод: 10 годин роботи оператора + витрати палива
Наша система: 30 хв підготовки → автономна робота → мінімальне втручання
Економія: ~70% часу оператора + 40% палива
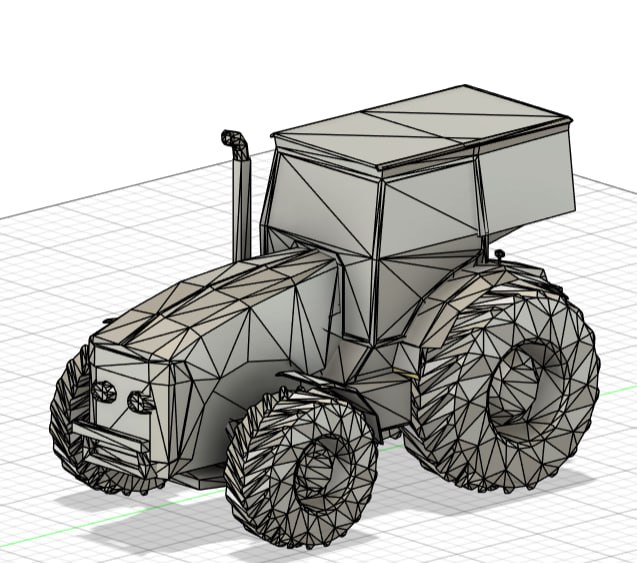
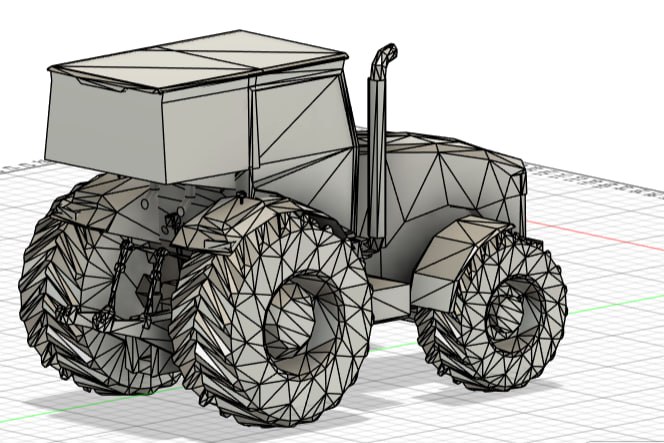
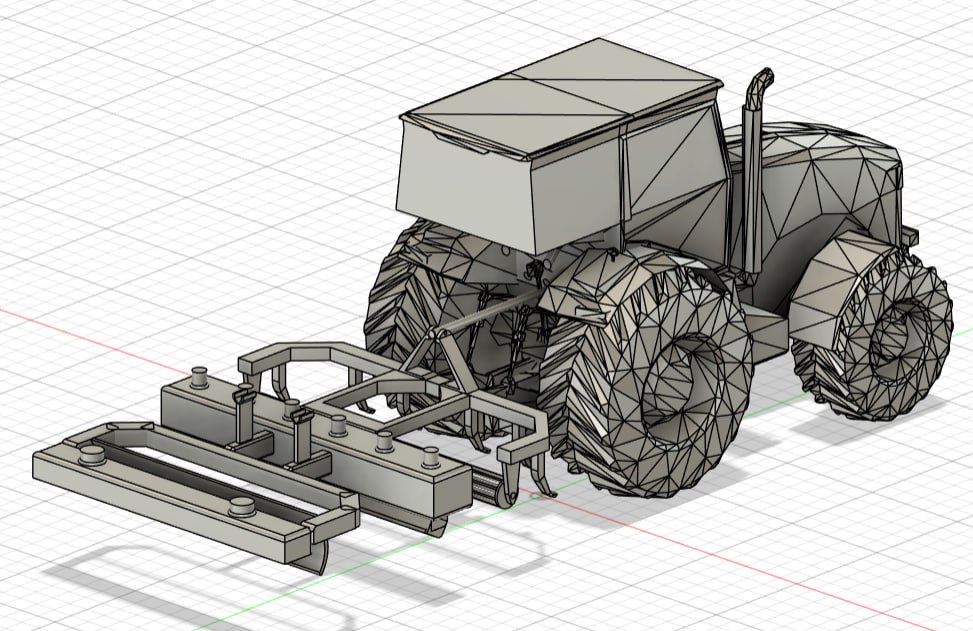
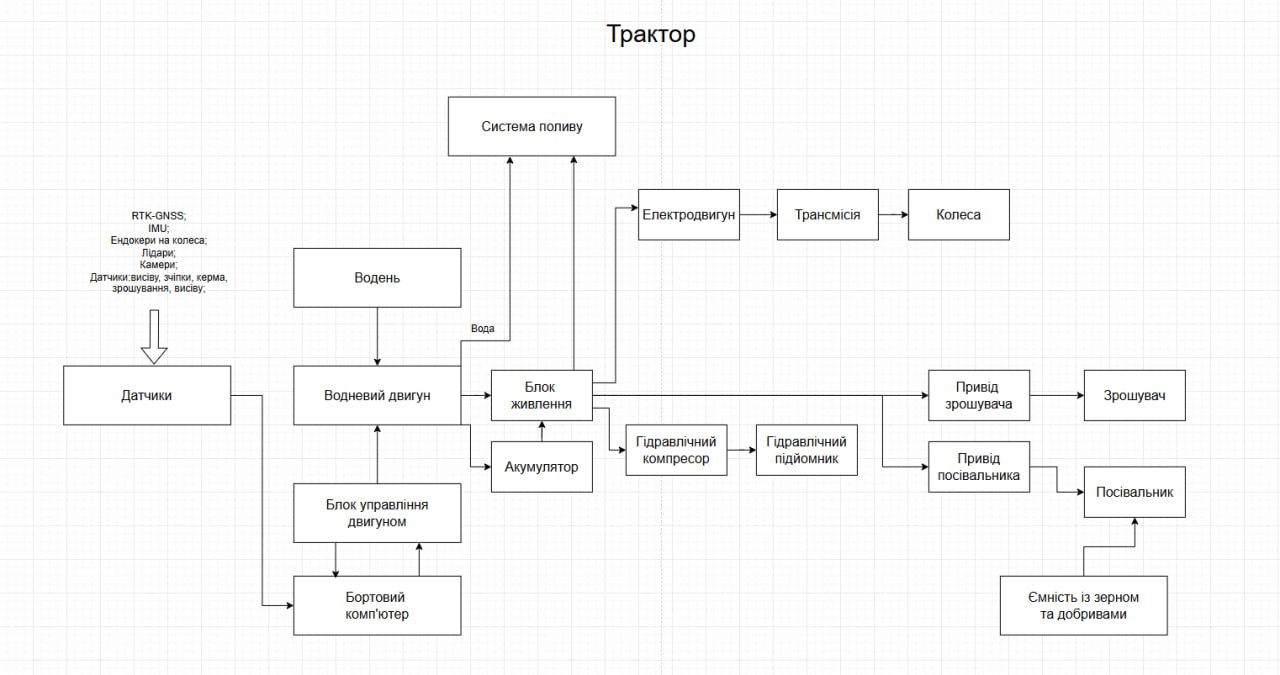
Трактор на випробуваннях
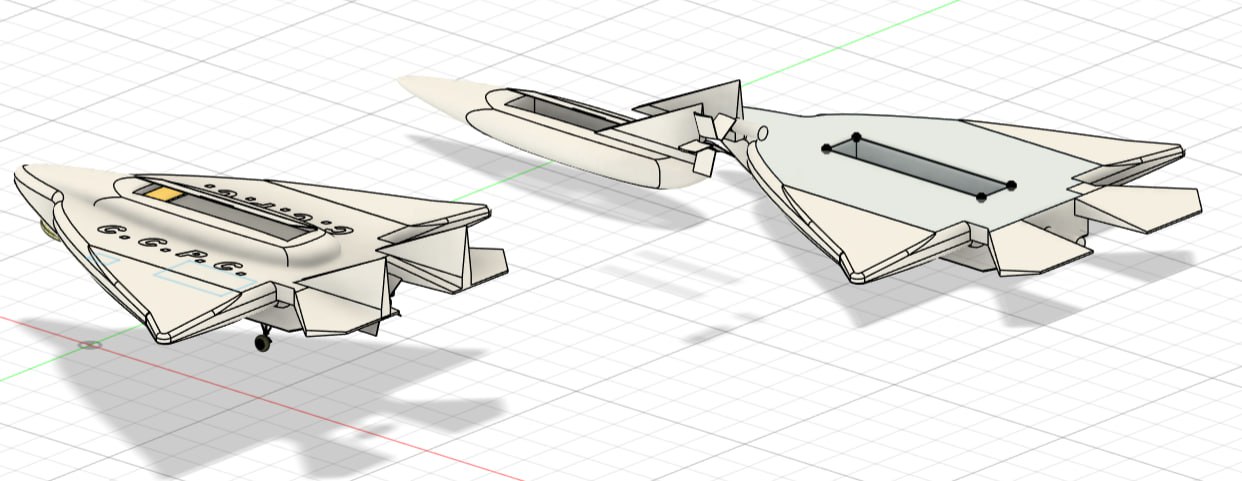
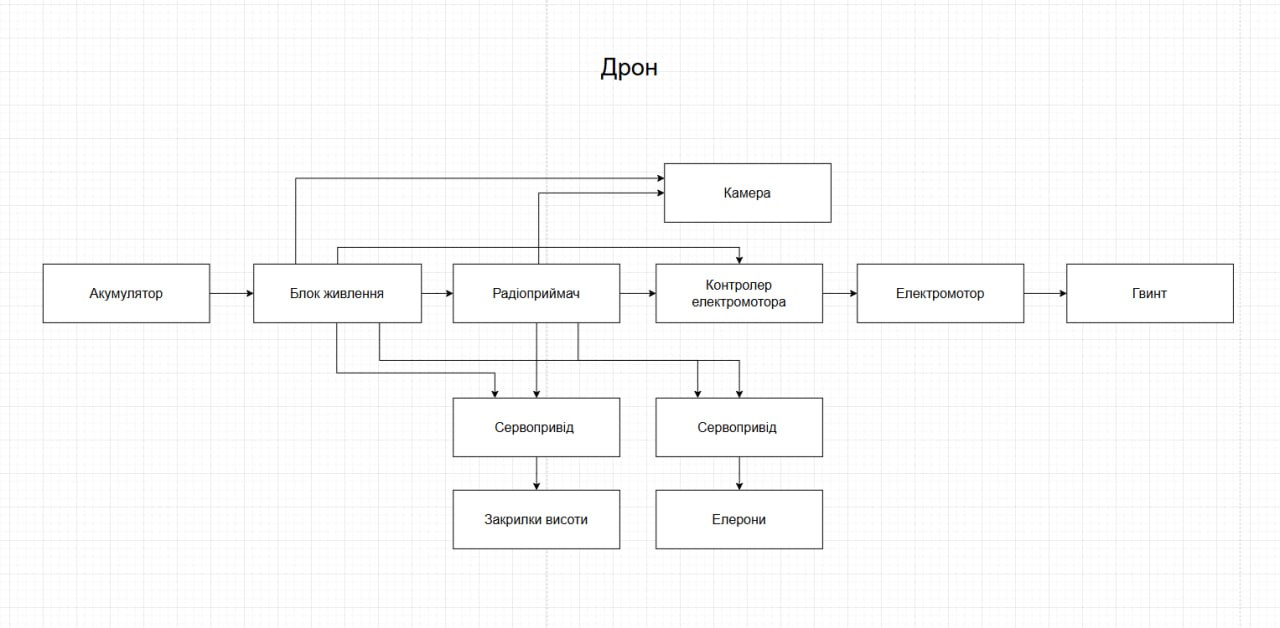
Дрон в польоті
Водневий двигун
Сенсори та датчики
3D карта поля
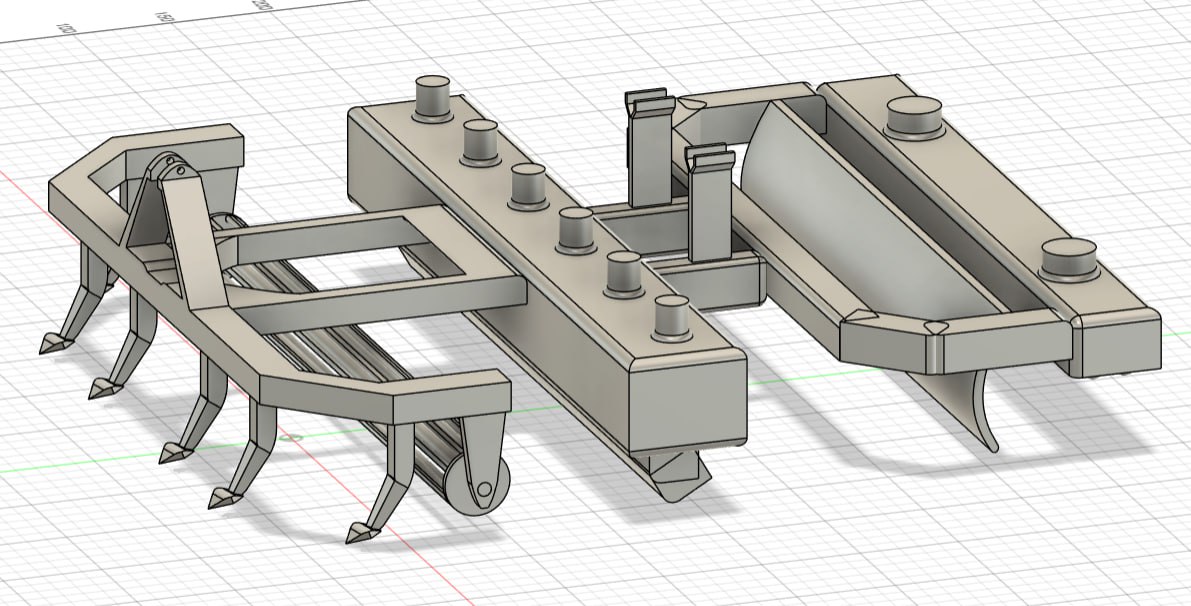
Збірка прототипу
Тут можна розмістити реальні фотографії вашого проєкту: прототипи, тестування, схеми, команда, робочий процес тощо. Просто замініть плейсхолдери на реальні зображення.